3.1.7.14. Orthotropic Material Wrapper
This command is used to construct an Orthotropic material object. It is a wrapper that can convert any 3D (Linear or Nonlinear) constitutive model to an orthotropic one.
- nDMaterial Orthotropic $matTag $theIsoMatTag $Ex $Ey $Ez $Gxy $Gyz $Gzx $vxy $vyz $vzx $Asigmaxx $Asigmayy $Asigmazz $Asigmaxyxy $Asigmayzyz $Asigmaxzxz
Argument |
Type |
Description |
|---|---|---|
$matTag |
integer |
unique tag identifying this orthotropic material wrapper |
$theIsoMatTag |
integer |
unique tag identifying a previously defined isotropic material |
$Ex $Ey $Ez |
3 float |
Elastic moduli in three mutually perpendicular directions |
$Gxy $Gyz $Gzx |
3 float |
Shear moduli |
$vxy $vyz $vzx |
3 float |
Poisson’s ratios |
$Asigmaxx |
float |
Ratio of the isotropic to the orthotropic strength along the X direction (Fxx_iso / Fxx_ortho) |
$Asigmayy |
float |
Ratio of the isotropic to the orthotropic strength along the Y direction (Fyy_iso / Fyy_ortho) |
$Asigmazz |
float |
Ratio of the isotropic to the orthotropic strength along the Z direction (Fzz_iso / Fzz_ortho) |
$Asigmaxyxy |
float |
Ratio of the isotropic to the orthotropic shear strength in the XY plane (Fxy_iso / Fxy_ortho) |
$Asigmayzyz |
float |
Ratio of the isotropic to the orthotropic shear strength in the YZ plane (Fyz_iso / Fyz_ortho) |
$Asigmaxzxz |
float |
Ratio of the isotropic to the orthotropic shear strength in the XZ plane (Fxz_iso / Fxz_ortho) |
3.1.7.14.1. Usage Notes
Note 1
The only material formulation for the Orthotropic material object is “ThreeDimensional”.
Note 2
The only material formulation allowed for the adapted isotropic material object is “ThreeDimensional”.
Example
Python Code
from openseespy import opensees as os
import math
from matplotlib import pyplot as plt
def analyze_dir (dX, dY, type):
# info
print("Analyze direction (%g, %g)" % (dX, dY))
# the 2D model
os.wipe()
os.model( "basic", "-ndm", 2, "-ndf", 2 )
# the material
E = 200000.0
v = 0.3
G = E/(2.0*(1.0+v))
K = E/(3.0*(1.0-2.0*v))
sig0 = 400.0
os.nDMaterial( "J2Plasticity", 1, K, G, sig0, sig0, 0.0, 0.0 )
# the orthotropic wrapper
if type == "ortho":
Ex = E*1.5
Ey = E
Ez = E
Gxy = G
Gyz = G
Gzx = G
vxy = v
vyz = v
vzx = v
Asigmaxx = 1.0/1.5 # fx_iso/fx_ortho
# nDMaterial Orthotropic $tag $theIsoMat $Ex $Ey $Ez $Gxy $Gyz $Gzx $vxy $vyz $vzx $Asigmaxx $Asigmayy $Asigmazz $Asigmaxyxy $Asigmayzyz $Asigmaxzxz.
os.nDMaterial( "Orthotropic", 2, 1, Ex, Ey, Ez, Gxy, Gyz, Gzx, vxy, vyz, vzx, Asigmaxx, 1.0, 1.0, 1.0, 1.0, 1.0)
os.nDMaterial( "PlaneStress", 3, 2)
# a triangle
os.node( 1, 0, 0 )
os.node( 2, 1, 0 )
os.node( 3, 0, 1 )
os.element( "tri31", 1, 1, 2, 3, 1.0, "PlaneStress", 3 if type == "ortho" else 1 )
# fixity
os.fix( 1, 1, 1)
os.fix( 2, 0, 1)
os.fix( 3, 1, 0)
# a simple ramp
os.timeSeries( "Linear", 1, "-factor", 2.0*sig0 )
# imposed stresses
os.pattern( "Plain", 1, 1 )
os.load( 2, dX, 0.0 )
os.load( 3, 0.0, dY )
# analyze
os.constraints( "Transformation" )
os.numberer( "Plain" )
os.system( "FullGeneral" )
os.test( "NormDispIncr", 1.0e-6, 3, 0)
os.algorithm( "Newton" )
dLambda = 0.1
dLambdaMin = 0.001
Lambda = 0.0
sX = 0.0
sY = 0.0
while 1 :
os.integrator( "LoadControl", dLambda )
os.analysis( "Static" )
ok = os.analyze( 1 )
if ok == 0:
stress = os.eleResponse( 1, "material", 1, "stress" )
sX = stress[0]
sY = stress[1]
Lambda += dLambda
if Lambda > 0.9999:
break
else:
dLambda /= 2.0
if dLambda < dLambdaMin:
break
# done
return (sX, sY)
NDiv = 48
NP = NDiv+1
dAngle = 2.0*math.pi/NDiv
SX = [0.0]*NP
SY = [0.0]*NP
SXortho = [0.0]*NP
SYortho = [0.0]*NP
for i in range(NDiv):
angle = i*dAngle
dX = math.cos(angle)
dY = math.sin(angle)
iso = analyze_dir(dX, dY, "iso")
ortho = analyze_dir(dX, dY, "ortho")
SX[i] = iso[0]
SY[i] = iso[1]
SXortho[i] = ortho[0]
SYortho[i] = ortho[1]
SX[-1] = SX[0]
SY[-1] = SY[0]
SXortho[-1] = SXortho[0]
SYortho[-1] = SYortho[0]
fig, ax = plt.subplots(1,1)
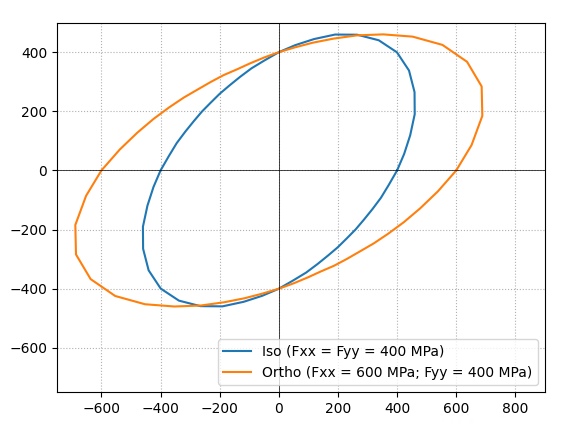
ax.plot(SX, SY, label='Iso (Fxx = Fyy = 400 MPa)')
ax.plot(SXortho, SYortho, label='Ortho (Fxx = 600 MPa; Fyy = 400 MPa)')
ax.grid(linestyle=':')
ax.set_aspect('equal', 'box')
ax.set(xlim=[-750, 900],ylim=[-750, 500])
ax.plot([-1000,1000],[0,0],color='black',linewidth=0.5)
ax.plot([0,0],[-1000,1000],color='black',linewidth=0.5)
ax.legend(loc='lower right')
plt.show()
Tcl Code
proc analyze_dir {dX dY type} {
# info
puts "Analyze direction ($dX, $dY)"
# the 2D model
wipe
model basic -ndm 2 -ndf 2
# the isotropic material
set E 200000.0
set v 0.3
set G [expr $E/(2.0*(1.0+$v))]
set K [expr $E/(3.0*(1.0-2.0*$v))]
set sig0 400.0
nDMaterial J2Plasticity 1 $K $G $sig0 $sig0 0.0 0.0
# the orthotropic wrapper
if {$type == "ortho"} {
set Ex [expr $E*1.5]
set Ey $E
set Ez $E
set Gxy $G
set Gyz $G
set Gzx $G
set vxy $v
set vyz $v
set vzx $v
set Asigmaxx [expr 1.0/1.5]; # fx_iso/fx_ortho
# nDMaterial Orthotropic $tag $theIsoMat $Ex $Ey $Ez $Gxy $Gyz $Gzx $vxy $vyz $vzx $Asigmaxx $Asigmayy $Asigmazz $Asigmaxyxy $Asigmayzyz $Asigmaxzxz.
nDMaterial Orthotropic 2 1 $Ex $Ey $Ez $Gxy $Gyz $Gzx $vxy $vyz $vzx $Asigmaxx 1.0 1.0 1.0 1.0 1.0
nDMaterial PlaneStress 3 2
}
# a triangle
node 1 0 0
node 2 1 0
node 3 0 1
if {$type == "ortho"} {
set mat_tag 3
} else {
set mat_tag 1
}
element tri31 1 1 2 3 1.0 "PlaneStress" $mat_tag
# fixity
fix 1 1 1
fix 2 0 1
fix 3 1 0
# a simple ramp
timeSeries Linear 1 -factor [expr 2.0*$sig0]
# imposed stresses
pattern Plain 1 1 {
load 2 $dX 0.0
load 3 0.0 $dY
}
# analyze
constraints Transformation
numberer Plain
system FullGeneral
test NormDispIncr 1.0e-6 3 0
algorithm Newton
set dLambda 0.1
set dLambdaMin 0.001
set Lambda 0.0
set sX 0.0
set sY 0.0
while 1 {
integrator LoadControl $dLambda
analysis Static
set ok [analyze 1]
if {$ok == 0} {
set stress [eleResponse 1 "material" 1 "stress"]
set sX [expr [lindex $stress 0]]
set sY [expr [lindex $stress 1]]
set Lambda [expr $Lambda + $dLambda]
if {$Lambda > 0.9999} {
break
}
} else {
set dLambda [expr $dLambda/2.0]
if {$dLambda < $dLambdaMin} {
break
}
}
}
# done
return [list $sX $sY]
}
set NDiv 48
set NP [expr $NDiv+1]
set pi [expr acos(-1)]
set dAngle [expr 2.0*$pi/$NDiv]
set SX {}
set SY {}
set SXortho {}
set SYortho {}
for {set i 0} {$i < $NDiv} {incr i} {
set angle [expr $i.0*$dAngle]
set dX [expr cos($angle)]
set dY [expr sin($angle)]
set iso [analyze_dir $dX $dY "iso"]
set ortho [analyze_dir $dX $dY "ortho"]
lappend SX [lindex $iso 0]
lappend SY [lindex $iso 1]
lappend SXortho [lindex $ortho 0]
lappend SYortho [lindex $ortho 1]
}
lappend SX [lindex $SX 0]
lappend SY [lindex $SY 0]
lappend SXortho [lindex $SXortho 0]
lappend SYortho [lindex $SYortho 0]
puts [format "%12s %12s %12s %12s" "Sx(iso)" "Sy(iso)" "Sx(ortho)" "Sy(ortho)"]
for {set i 0} {$i < $NP} {incr i} {
puts [format "%12.3f %12.3f %12.3f %12.3f" [lindex $SX $i] [lindex $SY $i] [lindex $SXortho $i] [lindex $SYortho $i]]
}
Code Developed by: Massimo Petracca at ASDEA Software, Italy.